Unitree Go2-W
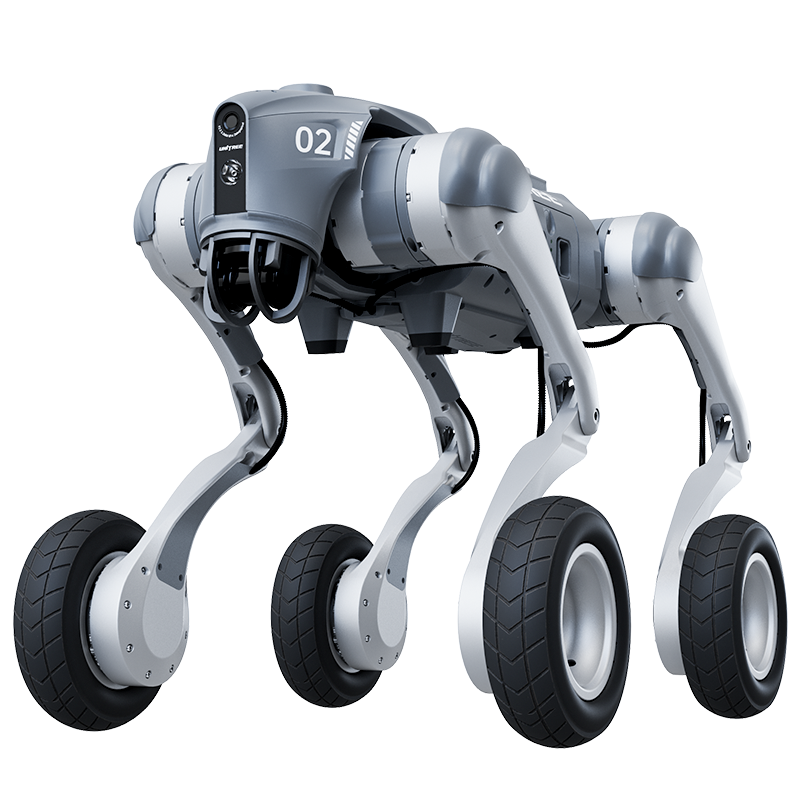
RobotActiveUnitree Go2-W is a wheel-legged quadruped robot developed by Unitree Robotics. Unlike traditional quadruped robots that rely solely on legged locomotion, Go2-W integrates powered wheels at the end of each leg, enabling efficient wheeled movement while retaining the adaptability of a legged platform. The robot is designed to operate across a wide range of environments including paved roads, industrial facilities, campuses, warehouses, and outdoor terrain. Its wheel-legged architecture allows it to move efficiently on flat surfaces while overcoming obstacles, slopes, curbs, stairs, and uneven terrain that are challenging for conventional wheeled robots. Go2-W features 16 high-performance joint motors, 7-inch pneumatic tires, onboard perception sensors including a super-wide-angle 3D LiDAR and HD wide-angle camera, and supports autonomous navigation, remote operation, and secondary development. The platform is intended for robotics research, embodied AI development, autonomous navigation, inspection, security patrol, education, and industrial applications. Through support for expansion modules and developer tooling, Go2-W can be integrated with additional computing platforms such as NVIDIA Jetson systems and custom software stacks. As a commercially available wheel-legged robot, Go2-W represents one of the most accessible platforms for researchers and developers interested in wheel-legged locomotion, robot autonomy, and embodied intelligence applications.